



本公司提供机器人调试、机器人安装、机器人编程、机器人保养、机器人维修、PLC程序编程,人机界面开发等技术服务,Fanuc机器人调试,OTC机器人调试、 发那科机器人编程、ABB机器人编程,安川机器人调试,川崎机器人调试, 库卡机器人编程、搬运机器人编程、焊接机器人编程、打磨机器人编程、码垛机器人编程
安川机器人故障维修合集-找仰光电子
01、机器人开关经常跳或者不能合闸?
原因:
1.开关老化;
2.开关选型不对;
3.水泵卡死或电机内部短路;
4.线路老化,短路,用线过小或者缺相。
解决办法:
将控制系统的电源关掉,然后用绕表量电机,电路的三相是否有短路或接地现象(测量时注意:要把变频输出端拆下来,以免测试时把变频输出的模块烧坏),用手转动电机看看是否有卡死,必要时更换开关。
02、机器人接触器噪音大?
原因:
很可能由于接触器的衔接触面不平造成,表面有沙或生锈。后果会造成缺相,最后导致接触器,开关变频等元器件的烧坏。
解决办法:
将控制该接触器的负载开关打下,手动快速开关接触器经过反复多次后如果响声还没有解除,需将其拆下将衔铁磨平,或者更换新的接触器。
03、机器人热继经常跳?
原因:
1.电机过载;
2.选型是否匹配;
3.否老化,主线是否过小。
解决方法:
看电机与热继的选型是否匹配,检查电机确保电机正常还有此现象需要更换新的。更换新的匹配主线。
04、机器人接触器或中继吸合不正常?
原因:
1.线圈零圈断路;
2.中间继电器头坏掉。
解决方法:
检查线路,更换新的中继头。
05、机器人变频器经常报故障?
原因:
1.参数设置不正确;
2.变频器老化;
3.水泵过载;
4.缺相;
5.线路松动。
解决方法:
先将变频器复位,如果短时间内重新发生相同的故障则说明变频器不能继续工作直至工作解除。变频器产生的故障代码记录下来,对照说明书将故障解决,将电路全部紧固一次,测量三相电流,看看是否平衡。供电电源缺相造成变频器输入端烧坏,或变频老化,需更换变频器。
06、机器人维修控制器输出输入点不正常或不能正常运转?
原因:
1.控制器的输入输出点长期频繁动作,造成控制器内部的触点烧毁;
2.由于触点经过强大的电流造成;
3.程序出错或控制器已被烧毁。
解决方法:
需要更新控制器的程序将烧毁的输入输出点通过软件改到备用触电上面用,必要时更换控制器。
07、安川机器人维修压力不稳波动大?
原因:
1.控制器的参数未调好;
2.水泵的效率太低。
08、机器人系统时好时坏,不能正常运行?
原因:
1.线路的出现松动;
2.元器件老化。
安川机器人维修控制柜常见故障及解决方法:
示教器检查,伺服驱动器状态,检查线路,紧固线路,检查元器件必要时更换。
09、机器人漏油?
原因:
1.保养不当;
2.腐蚀性部件损坏等。
处理方法:
检查漏油位置,确认漏油引起的部件。可通过查看图纸等准确判断漏油引起的部件。
10、机器人异响?
原因及解决办法:
出现异响故障时必须到客户现场诊断。通过仔细检查判断异响的轴,排出外界影响因素。查看最大力矩,检查铁粉等手段综合判断异响引起的故障。
11、机器人抖动?
诊断过程:
由于抖动区域和抖动量的区别,对于抖动的诊断成为一个难点。
现阶段诊断方法:更换放大器、更换电机、更换减速机逐个排除。
改进方法:通过电流电压检测、铁粉浓度检测、机器人间隙检测等方法进行综合判断。
处理方法:
1.检查各轴的运转情况;
2.确认抖动引起的轴;
3.确认是电气问题还是机械问题。
12、机器人轨迹误差?
原因:
1.轨迹偏处理;
2.现象机器人机械故障;
3.底座安装不稳;
4.外部工装位置偏差;
5.工件不一致;
6.焊枪等工具安装不稳。
解决办法:
此故障为软性故障,需要一段时间的观察才能准确判断。
具体步骤:
1.做好检查点,判断可能性原因;
2.从可能性原因逐项进行对应处理;
3.找到最终原因维修。
13、机器人下落(很危险)?
原因:
1.保养不当;
2.腐蚀性磨损;
3.疲劳磨损。
解决办法:
确认是什么状态下下落、下落量多少、报警状态。
下落状态:
上伺服下落、不上伺服下落。
下落量:
一直下落、还是下落一段时间停止。
报警状态:
下落报警、下落不报警。
14、机器人电气故障?
原因:
主要是电机电流不稳定造成电机输出力矩不稳定,导致抖动。
15、电机电流不稳定?
主要原因:
1.电机故障;
2.放大器故障;
3.连接电缆故障。
16、机械故障?
原因:
是电机输出力矩稳定情况下,其传动机械部件给电机的载荷不稳定造成抖动机械故障。
解决办法:
查找是减速机故障还是轴承故障,然后针对性解决。
17、伺服跟踪错误报警?
原因:
1.沟通→咨询作业时状态和报警时状态;
2.诊断→通过最大力矩和现场情况诊断;
3.维修→制定维修计划。
解决办法:
1.确认抱闸打开(能听到抱闸打开的声音);
2.检查油品情况(打开出油口取样检查);
3.拆下电机诊断(拆下电机单独旋转电)。
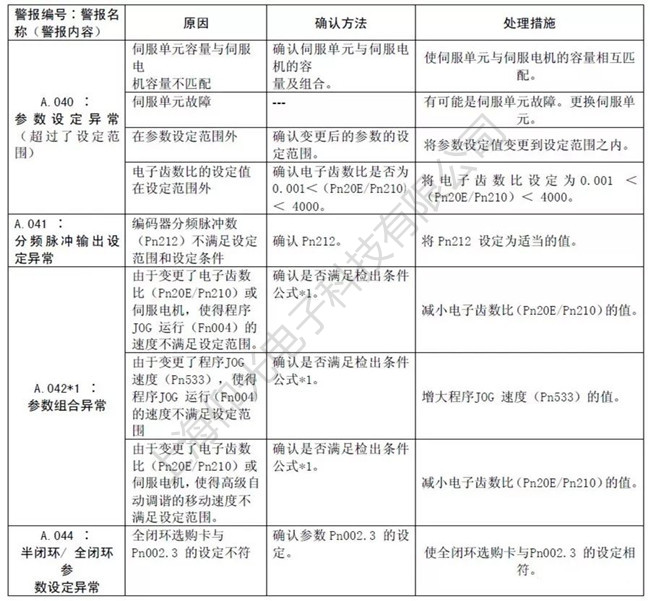
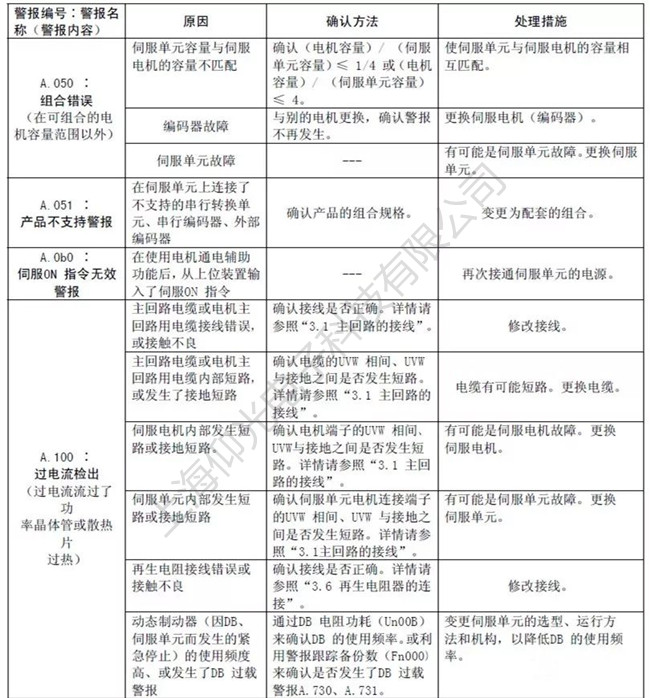
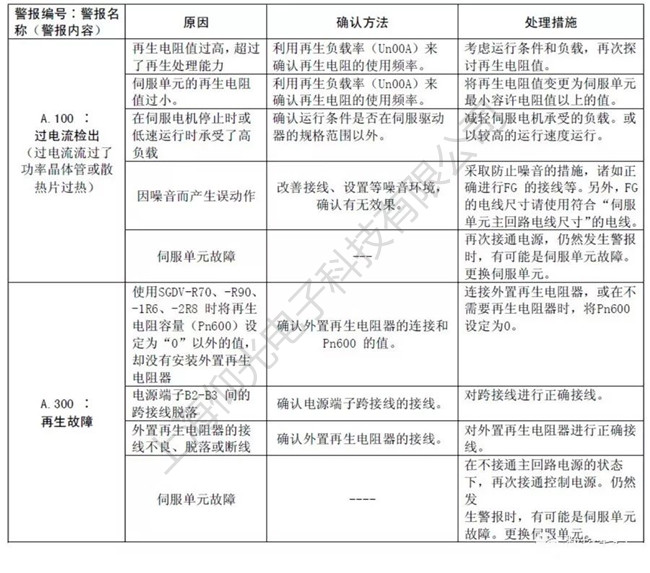
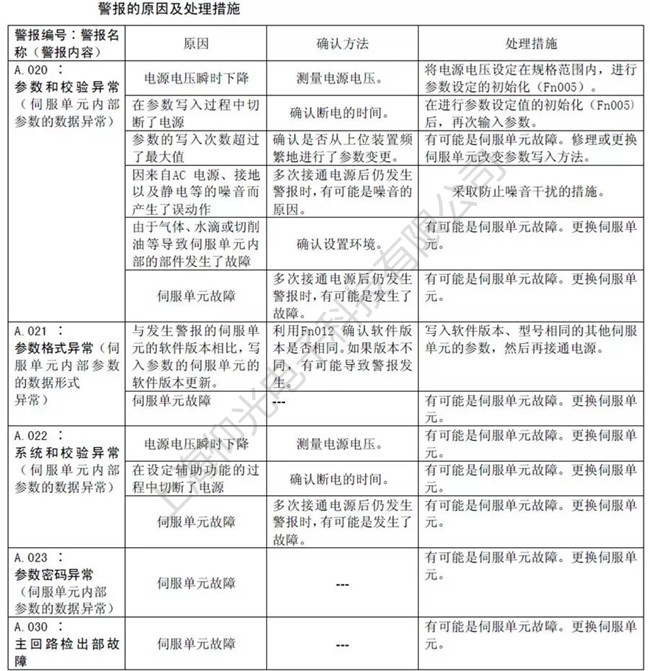
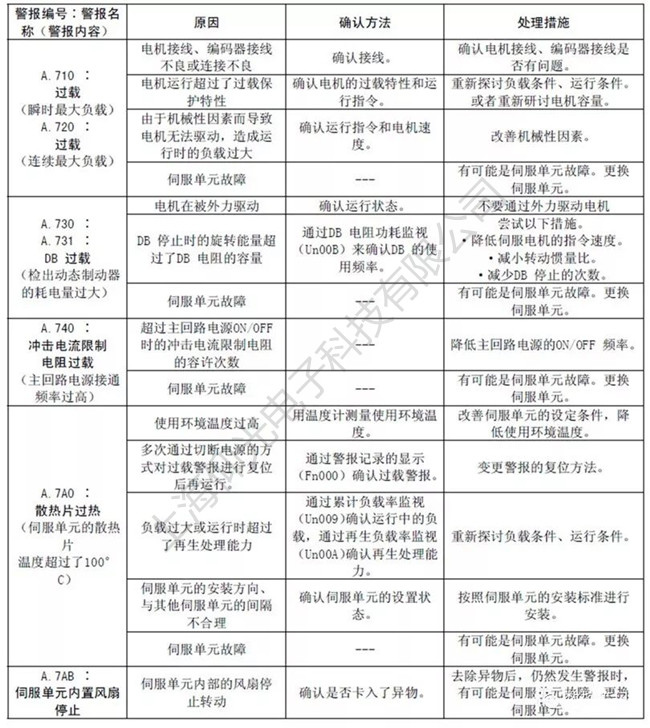
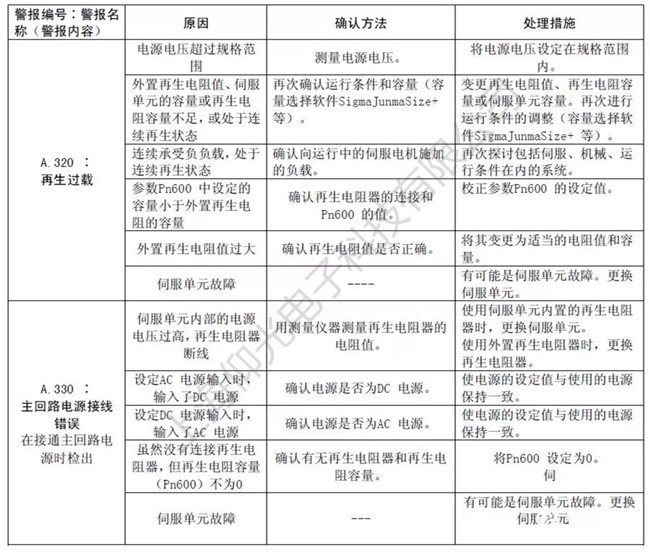
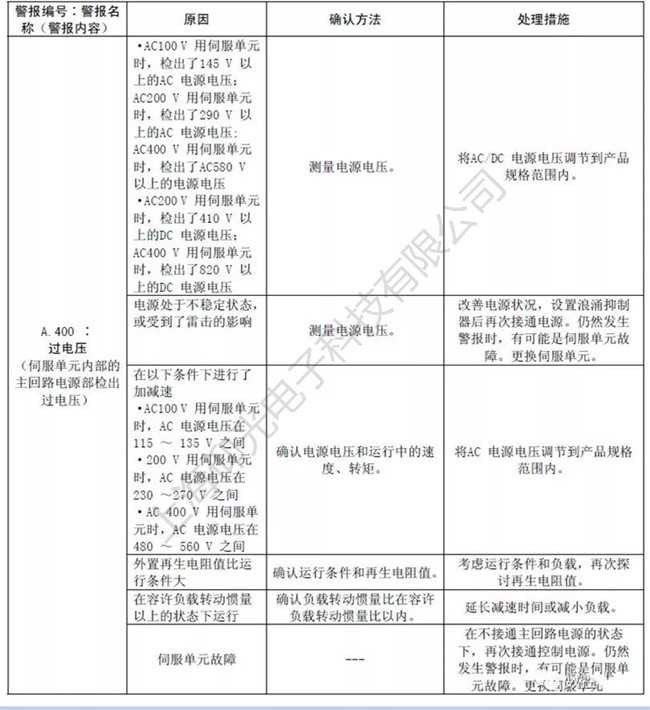
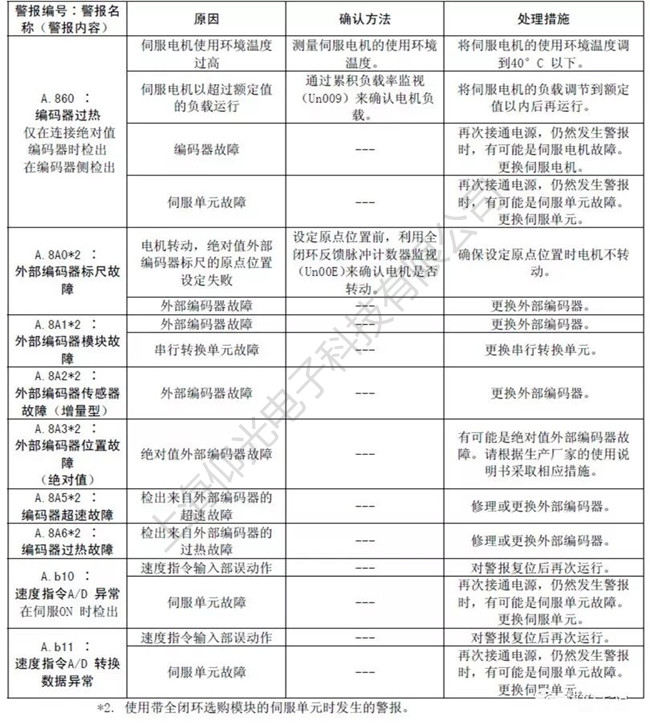
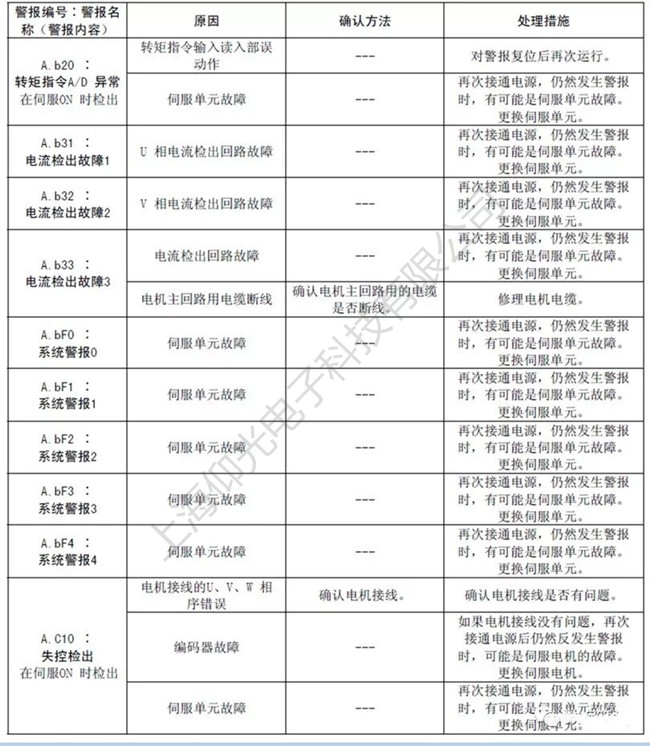
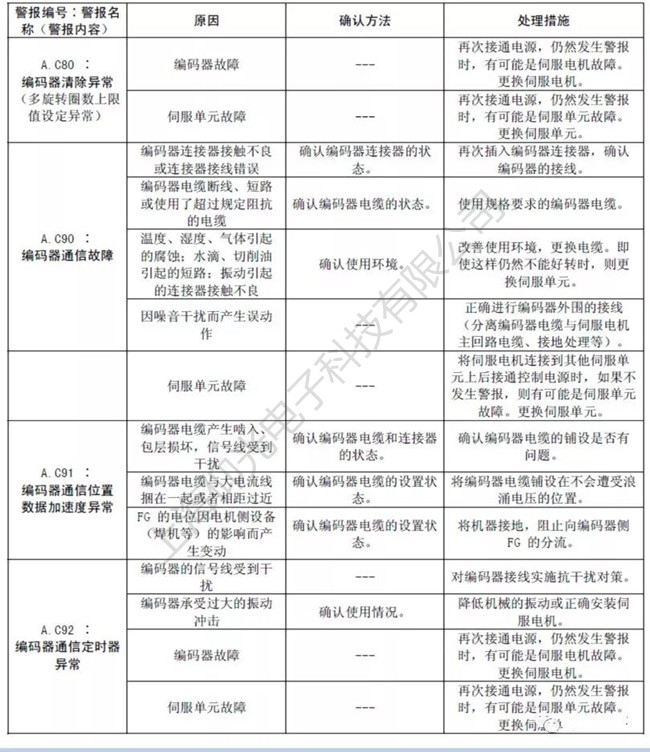
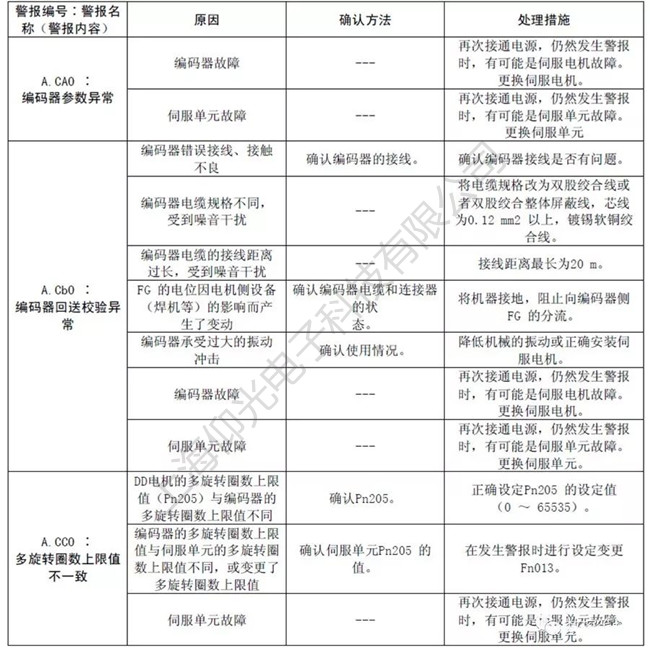
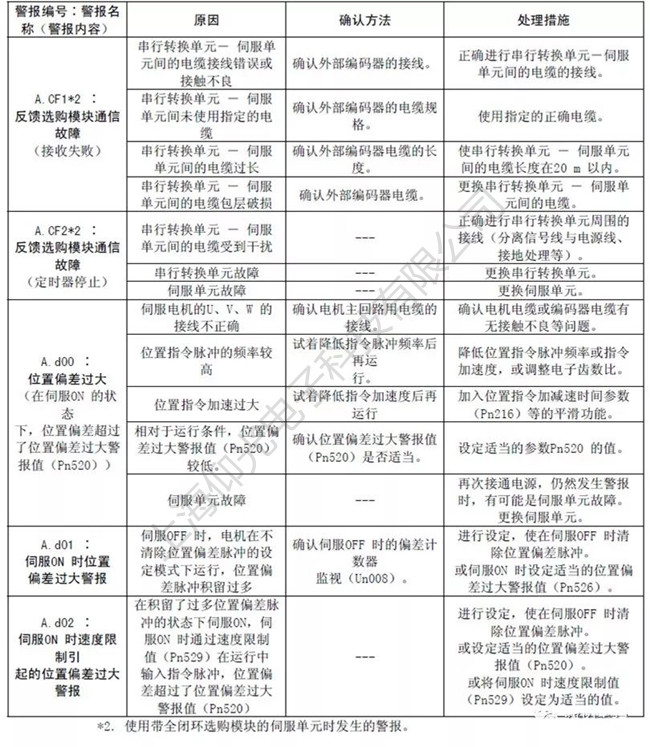
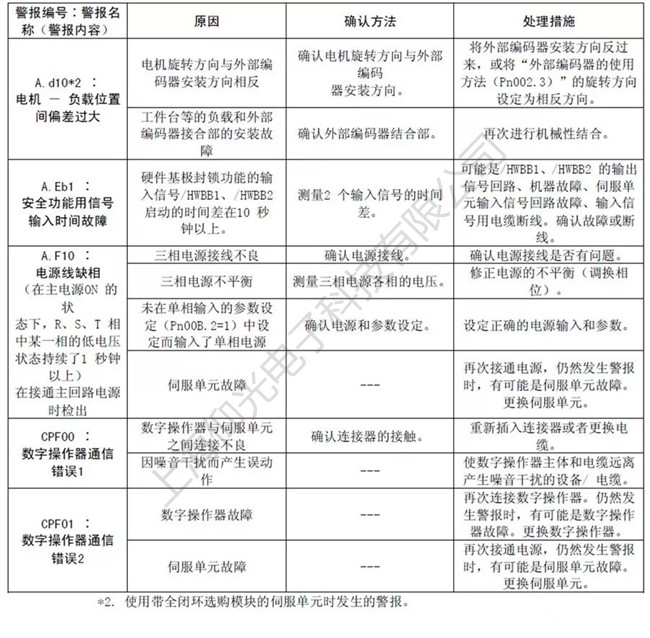
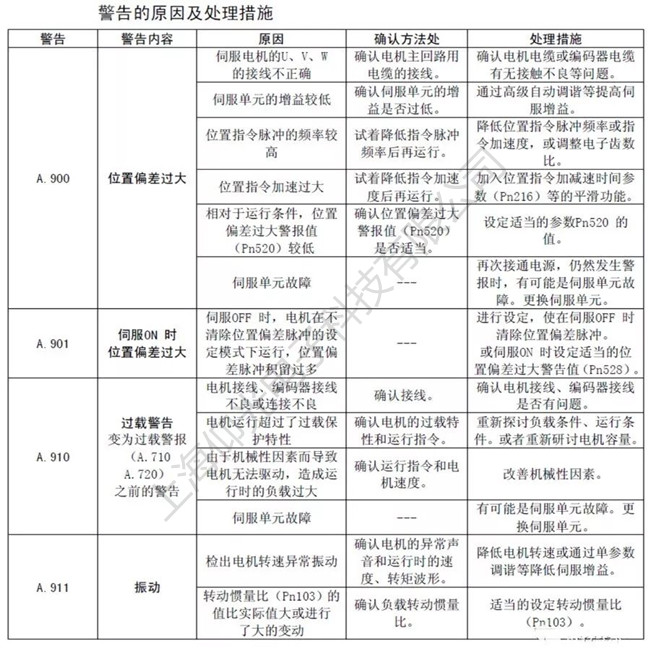
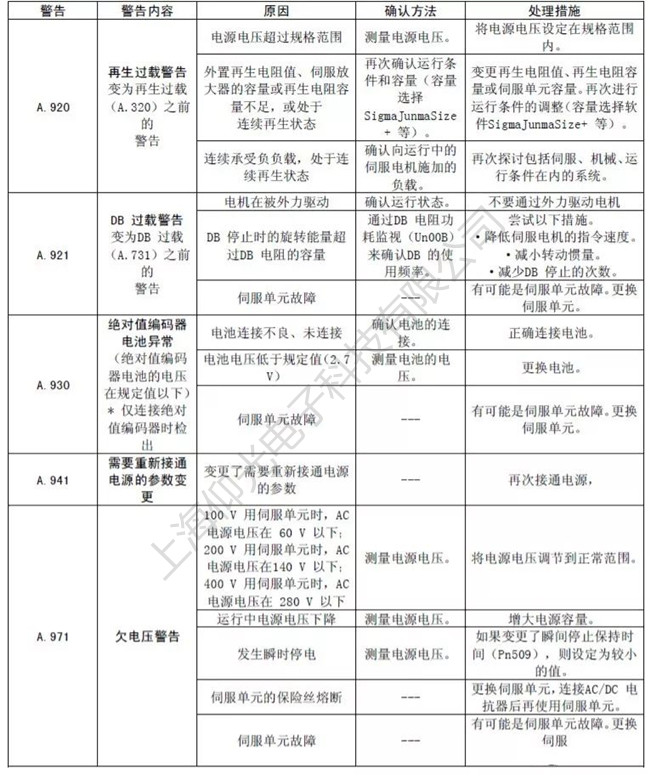
18、机器人警报的原因及处理措施?

转载请注明出处:上海仰光电子科技专业伺服驱动器维修,伺服电机维修
本文链接:http://www.shygdz.com/fuwu/Services_Show4551.htm
伺服驱动器维修 伺服电机维修 触摸屏维修 变频器维修
联系方式:
电话:021-50157782
手机:13817011982 微信同号
邮箱:shygdzi@163.com
联系人:张工
网址:http://www.shygdz.com
【 我们确保修好测试好给客户!!!!】
上一篇:快修TP1200西门子触摸失灵维修
下一篇:fagor电机常见故障排查及维修
